There are two very prevalent and corelated themes that will continue to define ocean technology over the coming decade: automation and remote operations. 21st century advances in ocean technology, more specifically complex subsea systems and custom oceanographic equipment, have forever transformed the way we work at sea, and many of the future plans of offshore developers and oceanic researchers alike hinge on the concept of subsea residency. That is, the ability to deploy automated marine assets—be them unmanned vehicles, sensors, or critical infrastructure—underwater for sustained periods, remotely.
As investments continue to pour into the development of ever-smarter subsea systems, understandably, the role of failsafe handing systems and support infrastructure is paramount. This is perhaps best amplified by a recent spike in interest for one specific product line at Okeanus: underwater winches.
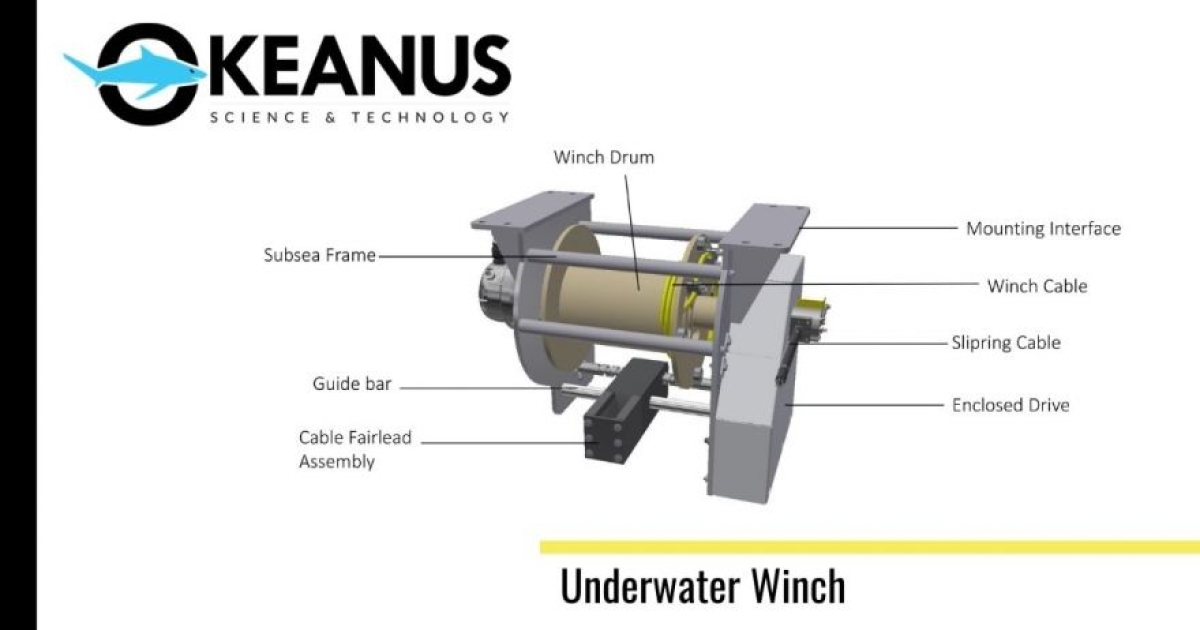
Underwater winches are typically used to perform a range of critical undersea tasks, common applications include: anchoring an unmanned asset, managing an ROV’s tether system, or deploying marine scientific equipment. Underwater winches can be deployed on the seafloor or within the water column, mounted on a subsurface platform. While their use in the field is nothing new, recent advances in underwater technology mean that they will likely prove instrumental in the next chapter of modern-day projects in ocean exploration, homeland security and defense, and offshore infrastructure development.
Expanding Subsea Horizons
Underwater winches are able to perform their tasks either autonomously (pre-programmed profiling schedule) or remotely from a comms cable installed on a seafloor, which ultimately means that they are capable of long-term operation without the need for continual topside support vessel. This paradigm shift is the key to unlocking at-sea cost and operational efficiencies, as well as keeping humans out of harm’s way.
In the coming years, underwater winches will prove essential to the mechanical workings of remote, automated marine offshore equipment and interconnected seabed infrastructure. These seafloor installations are particularly relevant to long-term defense missions or marine surveys that call for periodic data sampling over a sustained period of time. As we, the ocean industries, continue to progress subsea autonomy, our reliance on underwater winches to serve additional subsea applications will grow.
Design Considerations
A winch is never just a winch, especially when engineering for failproof subsea deployment. Some design considerations, as one might expect, mirror general deck-based oceanographic winch design parameters, such as line pull, line speed, minimum bend radius of cable, cable diameter, and cable length. Others relate more directly to the exacting in-field requirements, such as water depth, mounting (UUV vs. seafloor mounted), length of deployment, and controls and comms (autonomously commanded by host or remotely controlled by shoreside operator). Power budgeting/optimization is also critical, especially if the system is to be operated using battery power.
For longer deployments, material selection—and corrosion—is imperative. The need for special materials, cathodic protection, and coatings may be essential depending on the specific tasks or subaquatic environments. Further, it is not just the corrosive nature of seawater that poses a threat to failproof operations; biofouling—the undesirable accumulation of microorganisms, plants, algae and animals on submerged surfaces—can severely compromise the moving parts of an underwater winch.
Finally, underwater winches, for the most part, are designed to function without constant observation. Therefore, there must be confidence that the winch will perform to specification. This stage of product development involves complex analysis that often require inputs from customer developed systems, or 3rd party systems, to ensure that the winch is able to monitor its health/status and report as needed.
A Stage-Gate Approach
Suffice to say, there is no “one size fits all” when it comes to underwater winches; they tend to be custom designed or variants of existing blueprints. The process of engineering a fit-for-purpose, field-ready unit always begins with a set of requirements or statement of work, which the Okeanus team, draws up in partnership with our clients. Okeanus follows an established and well-defined product development process:
- Preliminary design phase: the application of general design guidelines to the requirement set, which results in a preliminary design that meets the intent/statement of work
- Detailed design phase: the selection of components to meet the design requirements and analysis of the structure/material chosen. At this stage, design refinements are made as required, amid the creation of detailed production and maintenance drawings
- Prototyping and testing phase: depending on the systems complexity, this phase will result in a fully functional unit being available for ongoing testing. Any future requirements are logged centrally to ensure that the next generation of winch addresses concerns that were not within the initial scope of work
- Final build phase: this is the green light for production
Naturally, the design of the winch is directly related to the duration of the deployment, because maintenance is nearly impossible while deployed. Our underwater winch designs must be simple and robust, yet perform the operation as required. We can use a variety of materials to extend the lifespan of our winches, when necessary, including stainless, anodized aluminum, and titanium. Okeanus also offers expert marine winch maintenance services at our facilities in Houston, TX, Houma, LA, and East Greenwich, RI.


